Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Robot Design
Explosive Legged Robotic Hopping: Energy Accumulation and Power Amplification via Pneumatic Augmentation
Pneumatic augmentation system for legged robots that stores and rapidly releases air pressure to enhance explosive hopping.
Yifei Chen
,
Arturo Gamboa-Gonzalez
,
Michael Wehner
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Video
DOI
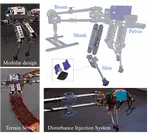
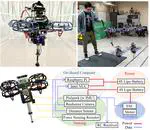
STRIDE: An Open-Source, Low-Cost, and Versatile Bipedal Robot Platform for Research and Education
An Open-sourced bipedal platform for education and research
Yuhao Huang
,
Yicheng Zeng
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Code
Video
DOI
Terrestrial Locomotion of PogoX: From Hardware Design to Energy Shaping and Step-to-step Dynamics Based Control
Novel controller and hardware design for a terrestrial locomotor - PogoX.
Yi Wang
,
Jiarong Kang 康家荣
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Video
DOI
Cite
×