Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Optimization-Based Control
Semi-Implicit Data-Driven Predictive Control for Agile Flying and Beyond
Data-driven control for improving the closed-loop control performance on legged robots
Yuhao Huang
,
Yicheng Zeng
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Open Review
Workshop Website
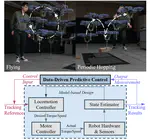
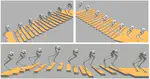
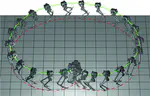
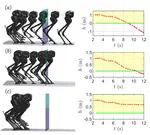
Reference-Steering via Data-Driven Predictive Control for Hyper-Accurate Robotic Flying-Hopping Locomotion
Data-driven control for improving the closed-loop control performance on legged robots
Yicheng Zeng
,
Yuhao Huang
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Video
Bipedal Walking on Constrained Footholds: Momentum Regulation via Vertical COM Control
An online walking synthesis methodology for momentum regulation.
Min Dai
,
Xiaobin Xiong 熊晓滨
,
Aaron D. Ames
PDF
Cite
Video
DOI
Global Position Control on Underactuated Bipedal Robots: Step-to-step Dynamics Approximation for Step Planning
Hybrid-Linear Inverted Pendulum (H-LIP) based stepping approach with Model Predictive Control (MPC) to achieve global position control and turning for underactuated 3D bipedal robots, validated on Cassie in simulation and experiment.
Xiaobin Xiong 熊晓滨
,
Jenna Reher
,
Aaron Ames
PDF
Cite
Video
DOI
Smooth Approximations for Hybrid Optimal Control Problems with Application to Robotic Walking
A novel approach to solving optimal control problems for hybrid dynamical systems with event-triggered discrete jumps
Tyler Westenbroek
,
Xiaobin Xiong 熊晓滨
,
S Shankar Sastry
,
Aaron D. Ames
PDF
Cite
DOI
Risk-averse control via CVaR barrier functions: Application to bipedal robot locomotion
Pneumatic augmentation system for legged robots that stores and rapidly releases air pressure to enhance explosive hopping.
Mohamadreza Ahmadi
,
Xiaobin Xiong 熊晓滨
,
Aaron D Ames
PDF
Cite
Video
DOI
Slip walking over rough terrain via h-lip stepping and backstepping-barrier function inspired quadratic program
We present an advanced and novel control method to enable actuated Spring Loaded Inverted Pendulum model to walk over rough and …
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Code
Video
DOI
Dynamic and versatile humanoid walking via embedding 3d actuated slip model with hybrid lip based stepping
In this letter, we propose an efficient approach to generate dynamic and versatile humanoid walking with non-constant center of mass …
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Video
DOI
Coupling Reduced Order Models via Feedback Control for 3D Underactuated Bipedal Robotic Walking
A control framework that couples aSLIP and LIP for movments in different directions.
Xiaobin Xiong 熊晓滨
,
Aaron D. Ames
PDF
Cite
Video
DOI
Bipedal Hopping: Reduced-order Model Embedding via Optimization-based Control
Bipedal Jumping Control via CLF-QP and Spring-Mass Model
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Video
DOI
Cite
×