Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Navigation
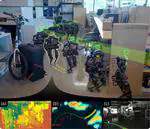
iWalker: Imperative Visual Planning for Walking Humanoid Robot
Humanoid navigation through complex environment using visual planner and feedback control.
Xiao Lin
,
Yuhao Huang
,
Taimeng Fu
,
Xiaobin Xiong 熊晓滨
,
Chen Wang
PDF
Cite
Video
Website
Cite
×