Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Model-Based Control
Slip walking over rough terrain via h-lip stepping and backstepping-barrier function inspired quadratic program
We present an advanced and novel control method to enable actuated Spring Loaded Inverted Pendulum model to walk over rough and …
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Code
Video
DOI
Energy-Efficient Motion Planning for Multi-Modal Hybrid Locomotion
Motion planning of hybrid locomoting robot
H.J. Terry Suh
,
Xiaobin Xiong 熊晓滨
,
Andrew Singletary
,
Aaron Ames
,
Joel Burdick
PDF
Cite
Video
DOI
Sequential motion planning for bipedal somersault via flywheel slip and momentum transmission with task space control
Somersaults of bipedal robot using spring-mass model
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Video
DOI
Dynamic and versatile humanoid walking via embedding 3d actuated slip model with hybrid lip based stepping
In this letter, we propose an efficient approach to generate dynamic and versatile humanoid walking with non-constant center of mass …
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Video
DOI
Motion decoupling and composition via reduced order model optimization for dynamic humanoid walking with clf-qp based active force control
Humanoid walking control using reduced order models.
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Video
DOI
Orbit Characterization, Stabilization and Composition on 3D Underactuated Bipedal Walking via Hybrid Passive Linear Inverted Pendulum Model
A Hybrid passive Linear Inverted Pendulum model for characterizing and stabilizing periodic walking orbits.
Xiaobin Xiong 熊晓滨
,
Aaron D Ames
PDF
Cite
Video
DOI
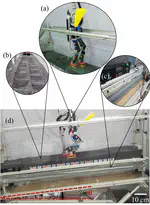
Bipedial locomotion up sandy slopes: Systematic experiments using zero moment point methods
Zero Moment Point (ZMP)-based gaits for a 7-DOF bipedal robot to ascend sandy slopes up to 10°, showing that optimizing step length and center of mass height improves stability and success rates on granular terrain.
Jonathan R Gosyne
,
Christian M Hubicki
,
Xiaobin Xiong 熊晓滨
,
Aaron D Ames
,
Daniel I Goldman
PDF
Cite
DOI
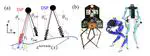
Bipedal Hopping: Reduced-order Model Embedding via Optimization-based Control
Bipedal Jumping Control via CLF-QP and Spring-Mass Model
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Video
DOI
A Stability Region Criterion for Flat-footed Bipedal Walking on Deformable Granular Terrain
Bipedal Walking on Deformable Terrain
Xiaobin Xiong 熊晓滨
,
Aaron Ames
,
Daniel Goldman
PDF
Cite
Video
DOI
«
Cite
×