Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Legged Robots
Efficient and Versatile Quadrupedal Skating: Optimal Co-design via Reinforcement Learning and Bayesian Optimization
Optimal Co-design for quadrupedal robotic skating using Bayesian optimization (BO) and Reinforcement Learning (RL)
Hanwen Wang 王瀚文
,
Zhenlong Fang 方振龙
,
Josiah Hanna
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Code
DOI
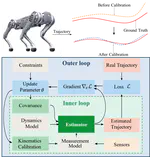
Simultaneous Calibration of Noise Covariance and Kinematics for State Estimation of Legged Robots via Bi-level Optimization
Bi-level optimization framework that jointly calibrates noise covariance and kinematics for state estimation on legged robots.
Denglin Cheng 程登临
,
Jiarong Kang 康家荣
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Code
DOI
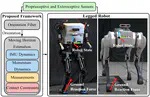
Simultaneous Ground Reaction Force and State Estimation via Constrained Moving Horizon Estimation
Simultaneous Ground Reaction Force and State Estimation framework for legged robots.
Jiarong Kang 康家荣
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Code
Video
Fast Decentralized State Estimation for Legged Robot Locomotion via EKF and MHE
A decentralized framework for fast state estimation on legged robots.
Jiarong Kang 康家荣
,
Yi Wang
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Code
Video
DOI
Cite
×