Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Hybrid Robots
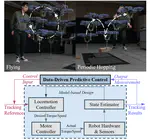
Semi-Implicit Data-Driven Predictive Control for Agile Flying and Beyond
Data-driven control for improving the closed-loop control performance on legged robots
Yuhao Huang
,
Yicheng Zeng
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Open Review
Workshop Website
Reference-Steering via Data-Driven Predictive Control for Hyper-Accurate Robotic Flying-Hopping Locomotion
Data-driven control for improving the closed-loop control performance on legged robots
Yicheng Zeng
,
Yuhao Huang
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Video
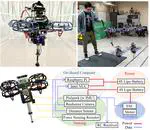
Terrestrial Locomotion of PogoX: From Hardware Design to Energy Shaping and Step-to-step Dynamics Based Control
Novel controller and hardware design for a terrestrial locomotor - PogoX.
Yi Wang
,
Jiarong Kang 康家荣
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Video
DOI
Energy-Efficient Motion Planning for Multi-Modal Hybrid Locomotion
Motion planning of hybrid locomoting robot
H.J. Terry Suh
,
Xiaobin Xiong 熊晓滨
,
Andrew Singletary
,
Aaron Ames
,
Joel Burdick
PDF
Cite
Video
DOI
Cite
×