Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Humanoids
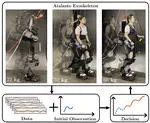
Data-Driven Predictive Control for Robust Exoskeleton Locomotion
Hankel-driven DDPC with IK/passivity yields robust, load-adaptive Atalante exoskeleton walking
Kejun Li
,
Jeeseop Kim
,
Xiaobin Xiong 熊晓滨
,
Kaveh Akbari Hamed
,
Yisong Yue
,
Aaron D. Ames
PDF
Cite
Video
DOI
Motion decoupling and composition via reduced order model optimization for dynamic humanoid walking with clf-qp based active force control
Humanoid walking control using reduced order models.
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Video
DOI
Cite
×