Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Deformable Terrain
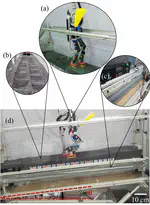
Bipedial locomotion up sandy slopes: Systematic experiments using zero moment point methods
Zero Moment Point (ZMP)-based gaits for a 7-DOF bipedal robot to ascend sandy slopes up to 10°, showing that optimizing step length and center of mass height improves stability and success rates on granular terrain.
Jonathan R Gosyne
,
Christian M Hubicki
,
Xiaobin Xiong 熊晓滨
,
Aaron D Ames
,
Daniel I Goldman
PDF
Cite
DOI
A Stability Region Criterion for Flat-footed Bipedal Walking on Deformable Granular Terrain
Bipedal Walking on Deformable Terrain
Xiaobin Xiong 熊晓滨
,
Aaron Ames
,
Daniel Goldman
PDF
Cite
Video
DOI
Cite
×