Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Control Theory
Smooth Approximations for Hybrid Optimal Control Problems with Application to Robotic Walking
A novel approach to solving optimal control problems for hybrid dynamical systems with event-triggered discrete jumps
Tyler Westenbroek
,
Xiaobin Xiong 熊晓滨
,
S Shankar Sastry
,
Aaron D. Ames
PDF
Cite
DOI
Risk-averse control via CVaR barrier functions: Application to bipedal robot locomotion
Pneumatic augmentation system for legged robots that stores and rapidly releases air pressure to enhance explosive hopping.
Mohamadreza Ahmadi
,
Xiaobin Xiong 熊晓滨
,
Aaron D Ames
PDF
Cite
Video
DOI
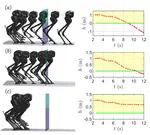
Slip walking over rough terrain via h-lip stepping and backstepping-barrier function inspired quadratic program
We present an advanced and novel control method to enable actuated Spring Loaded Inverted Pendulum model to walk over rough and …
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Code
Video
DOI
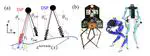
Optimal Control of Piecewise-Smooth Control Systems via Singular Perturbations
Develops a smooth approximation framework to solve optimal control problems in piecewise-smooth vector fields, and generates motion plans for a 18-DOF lower-body exoskeleton.
Tyler Westenbroek
,
Xiaobin Xiong 熊晓滨
,
Aaron Ames
,
Shankar Sastry
PDF
Cite
DOI
Technical Report
Bipedal Hopping: Reduced-order Model Embedding via Optimization-based Control
Bipedal Jumping Control via CLF-QP and Spring-Mass Model
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Video
DOI
Cite
×