Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
Research
People
News
Education
Gallery
Publications
Join-us
Bi-Level Optimization
Efficient and Versatile Quadrupedal Skating: Optimal Co-design via Reinforcement Learning and Bayesian Optimization
Optimal Co-design for quadrupedal robotic skating using Bayesian optimization (BO) and Reinforcement Learning (RL)
Hanwen Wang 王瀚文
,
Zhenlong Fang 方振龙
,
Josiah Hanna
,
Xiaobin Xiong 熊晓滨
PDF
Cite
DOI
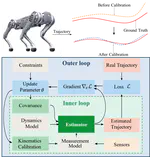
Simultaneous Calibration of Noise Covariance and Kinematics for State Estimation of Legged Robots via Bi-level Optimization
Bi-level optimization framework that jointly calibrates noise covariance and kinematics for state estimation on legged robots.
Denglin Cheng 程登临
,
Jiarong Kang 康家荣
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Code
Video
DOI
Cite
×