Simultaneous Calibration of Noise Covariance and Kinematics for State Estimation of Legged Robots via Bi-level Optimization
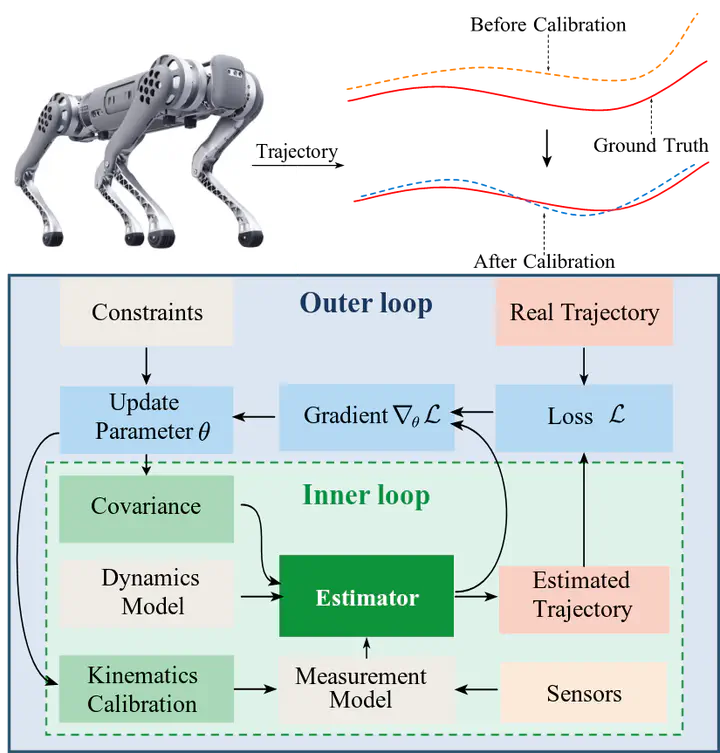 Illustration of the proposed bi-level calibration framework for legged robot state estimation.
Illustration of the proposed bi-level calibration framework for legged robot state estimation.Abstract
Accurate state estimation is critical for legged and aerial robots operating in dynamic, uncertain environments. A key challenge lies in specifying process and measurement noise covariances, which are typically unknown or manually tuned. In this work, we introduce a bi-level optimization framework that jointly calibrates covariance matrices and kinematic parameters in an estimator-in-the-loop manner. The upper level treats noise covariances and model parameters as optimization variables, while the lower level executes a full-information estimator. Differentiating through the estimator allows direct optimization of trajectory-level objectives, resulting in accurate and consistent state estimates. We validate our approach on quadrupedal and humanoid robots, demonstrating significantly improved estimation accuracy and uncertainty calibration compared to hand-tuned baselines. Our method unifies state estimation, sensor, and kinematics calibration into a principled, data-driven framework applicable across diverse robotic platforms.
Denglin Cheng 程登临
Graduate Research Assistant
Denglin joined the lab in the Summer of 2025 as a visiting student.
Jiarong Kang 康家荣
PhD Student & UW-Madison
Jiarong joined the lab in the Fall of 2023 as a PhD student.
Xiaobin Xiong 熊晓滨
Associate Professor @ SII
Prof. Xiong is a full-stack roboticist who develop rigorous theories for practical applications.