From Human Walking to Bipedal Robot Locomotion: Reflex Inspired Compensation on Planned and Unplanned Downsteps
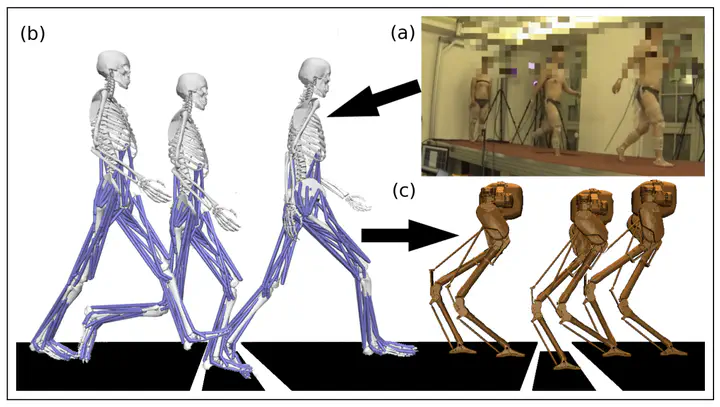 The human measurement data mapped to a representative skeletal model of the test subject, compared to 3d cassie subjected to the same downstep height.
The human measurement data mapped to a representative skeletal model of the test subject, compared to 3d cassie subjected to the same downstep height.Abstract
Humans are able to negotiate downstep behaviors – both planned and unplanned – with remarkable agility and ease. The goal of this paper is to systematically study the translation of this human behavior to bipedal walking robots, even if the morphology is inherently different. Concretely, we begin with human data wherein planned and unplanned downsteps are taken. We analyze this data from the perspective of reduced-order modeling of the human, encoding the center of mass (CoM) kinematics and contact forces, which allows for the translation of these behaviors into the corresponding reduced-order model of a bipedal robot. We embed the resulting behaviors into the full-order dynamics of a bipedal robot via nonlinear optimization-based controllers. The end result is the demonstration of planned and unplanned downsteps in simulation on an underactuated walking robot.
Xiaobin Xiong 熊晓滨
Associate Professor @ SII
Prof. Xiong is a full-stack roboticist who develop rigorous theories for practical applications.