Bipedal Walking on Constrained Footholds: Momentum Regulation via Vertical COM Control
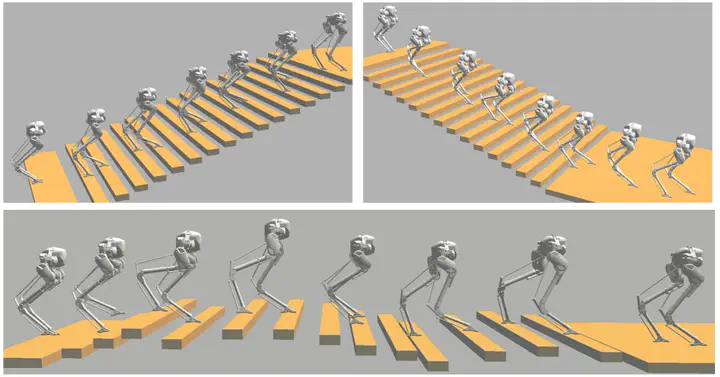 Cassie walking upstairs, downstairs, and on random stepping stones.
Cassie walking upstairs, downstairs, and on random stepping stones.Abstract
This paper presents an online walking synthesis methodology to enable dynamic and stable walking on constrained footholds for underactuated bipedal robots. Our approach modulates the change of angular momentum about the foot-ground contact pivot at discrete impact using pre-impact vertical center of mass (COM) velocity. To this end, we utilize the underactuated Linear Inverted Pendulum (LIP) model for approximating the underactuated walking dynamics to provide the desired post-impact angular momentum for each step. Desired outputs are constructed via online optimization combined with closed-form polynomials and tracked via a quadratic program (QP) based controller. This method is demonstrated on two robots, AMBER and 3D Cassie, for which stable walking behaviors with constrained footholds are realized on flat ground, stairs, and randomly located stepping stones.
Xiaobin Xiong 熊晓滨
Associate Professor @ SII
Prof. Xiong is a full-stack roboticist who develop rigorous theories for practical applications.