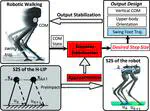
A stepping stabilization control for bipedal robots, leveraging learned linear step-to-step (S2S) dynamics with bounded model discrepancy, using step size as the control input to maintain approximately constant center of mass height and mitigate external push disturbances.