Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Paper-Conference
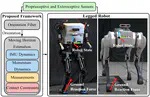
Simultaneous Ground Reaction Force and State Estimation via Constrained Moving Horizon Estimation
Simultaneous Ground Reaction Force and State Estimation framework for legged robots.
Jiarong Kang 康家荣
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Code
Video
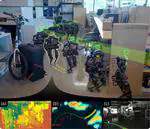
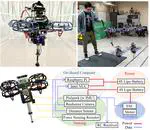
iWalker: Imperative Visual Planning for Walking Humanoid Robot
Humanoid navigation through complex environment using visual planner and feedback control.
Xiao Lin
,
Yuhao Huang
,
Taimeng Fu
,
Xiaobin Xiong 熊晓滨
,
Chen Wang
PDF
Cite
Video
Website
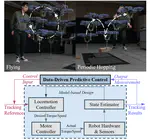
Reference-Steering via Data-Driven Predictive Control for Hyper-Accurate Robotic Flying-Hopping Locomotion
Data-driven control for improving the closed-loop control performance on legged robots
Yicheng Zeng
,
Yuhao Huang
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Video
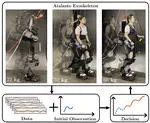
Data-Driven Predictive Control for Robust Exoskeleton Locomotion
Hankel-driven DDPC with IK/passivity yields robust, load-adaptive Atalante exoskeleton walking
Kejun Li
,
Jeeseop Kim
,
Xiaobin Xiong 熊晓滨
,
Kaveh Akbari Hamed
,
Yisong Yue
,
Aaron D. Ames
PDF
Cite
Video
DOI
Explosive Legged Robotic Hopping: Energy Accumulation and Power Amplification via Pneumatic Augmentation
Pneumatic augmentation system for legged robots that stores and rapidly releases air pressure to enhance explosive hopping.
Yifei Chen
,
Arturo Gamboa-Gonzalez
,
Michael Wehner
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Video
DOI
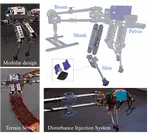
STRIDE: An Open-Source, Low-Cost, and Versatile Bipedal Robot Platform for Research and Education
An Open-sourced bipedal platform for education and research
Yuhao Huang
,
Yicheng Zeng
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Code
Video
DOI
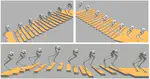
Terrestrial Locomotion of PogoX: From Hardware Design to Energy Shaping and Step-to-step Dynamics Based Control
Novel controller and hardware design for a terrestrial locomotor - PogoX.
Yi Wang
,
Jiarong Kang 康家荣
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Video
DOI
Data-Driven Predictive Control for Robust Exoskeleton Locomotion
Adaptive, data-driven step-to-step control learns foot placements online
Min Dai
,
Xiaobin Xiong 熊晓滨
,
Jaemin Lee
,
Aaron D. Ames
PDF
Cite
Video
DOI
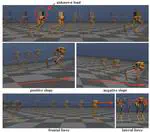
From Human Walking to Bipedal Robot Locomotion: Reflex Inspired Compensation on Planned and Unplanned Downsteps
Translates human downstep behaviors into bipedal robot control through reduced-order modeling and nonlinear optimization.
Joris Verhagen
,
Xiaobin Xiong 熊晓滨
,
Aaron D. Ames
PDF
Cite
Video
DOI
Bipedal Walking on Constrained Footholds: Momentum Regulation via Vertical COM Control
An online walking synthesis methodology for momentum regulation.
Min Dai
,
Xiaobin Xiong 熊晓滨
,
Aaron D. Ames
PDF
Cite
Video
DOI
»
Cite
×