Legged AI Lab 熊晓滨课题组
Legged AI Lab 熊晓滨课题组
Tour
News
People
Education
Gallery
Publications
Contact
Article-Journal
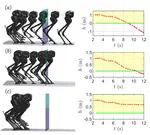
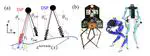
Fast Decentralized State Estimation for Legged Robot Locomotion via EKF and MHE
A decentralized framework for fast state estimation on legged robots.
Jiarong Kang 康家荣
,
Yi Wang
,
Xiaobin Xiong 熊晓滨
PDF
Cite
Code
Video
DOI
3D underactuated bipedal walking via h-lip based gait synthesis and stepping stabilization
Reduced Order Model based Control for Bipedal Walking
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Code
Video
DOI
Risk-averse control via CVaR barrier functions: Application to bipedal robot locomotion
Pneumatic augmentation system for legged robots that stores and rapidly releases air pressure to enhance explosive hopping.
Mohamadreza Ahmadi
,
Xiaobin Xiong 熊晓滨
,
Aaron D Ames
PDF
Cite
Video
DOI
Slip walking over rough terrain via h-lip stepping and backstepping-barrier function inspired quadratic program
We present an advanced and novel control method to enable actuated Spring Loaded Inverted Pendulum model to walk over rough and …
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Code
Video
DOI
Dynamic and versatile humanoid walking via embedding 3d actuated slip model with hybrid lip based stepping
In this letter, we propose an efficient approach to generate dynamic and versatile humanoid walking with non-constant center of mass …
Xiaobin Xiong 熊晓滨
,
Aaron Ames
PDF
Cite
Video
DOI
Temporal clustering of surgical activities in robot-assisted surgery
Purpose - Most evaluations of surgical workflow or surgeon skill use simple, descriptive statistics (e.g., time) across whole …
Aneeq Zia
,
Chi Zhang
,
Xiaobin Xiong 熊晓滨
,
Anthony M Jarc
PDF
Cite
Cite
×