Two paper to appear in IROS 2024!
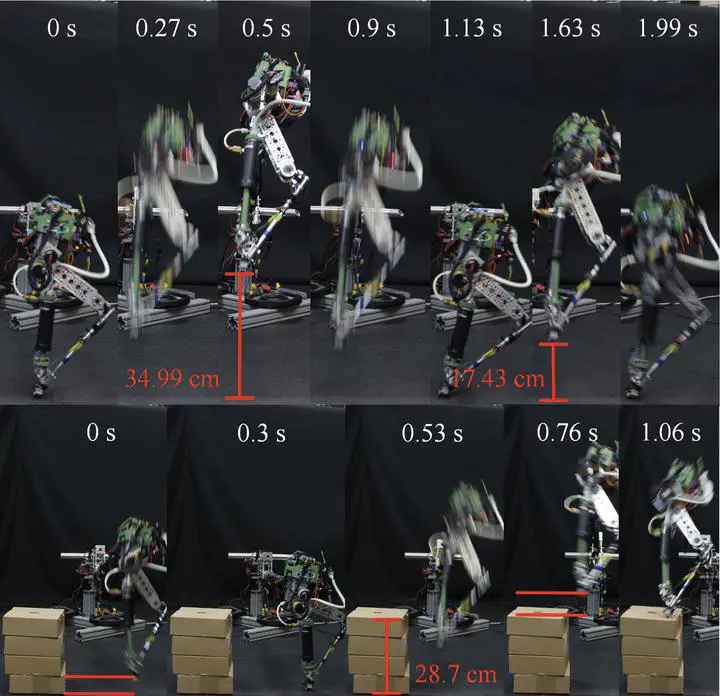
We have two paper to present in IROS this year. The first work is a collaboration with Dr. Michael Vehner, in which we proposed a novel pneumatic augmentation approach to enable high-powered jumping on low-powered robots:
The second work is led by Amy Li, where we realized data-driven predictive control approach for improving control of exoskeleton walking:
Many thanks to Amy Li for presenting this two paper.
Xiaobin Xiong 熊晓滨
Associate Professor @ SII
Prof. Xiong is a full-stack roboticist who develop rigorous theories for practical applications.